A soft robot that 'thinks' with its legs, through physical synchronization.
Science, 2025
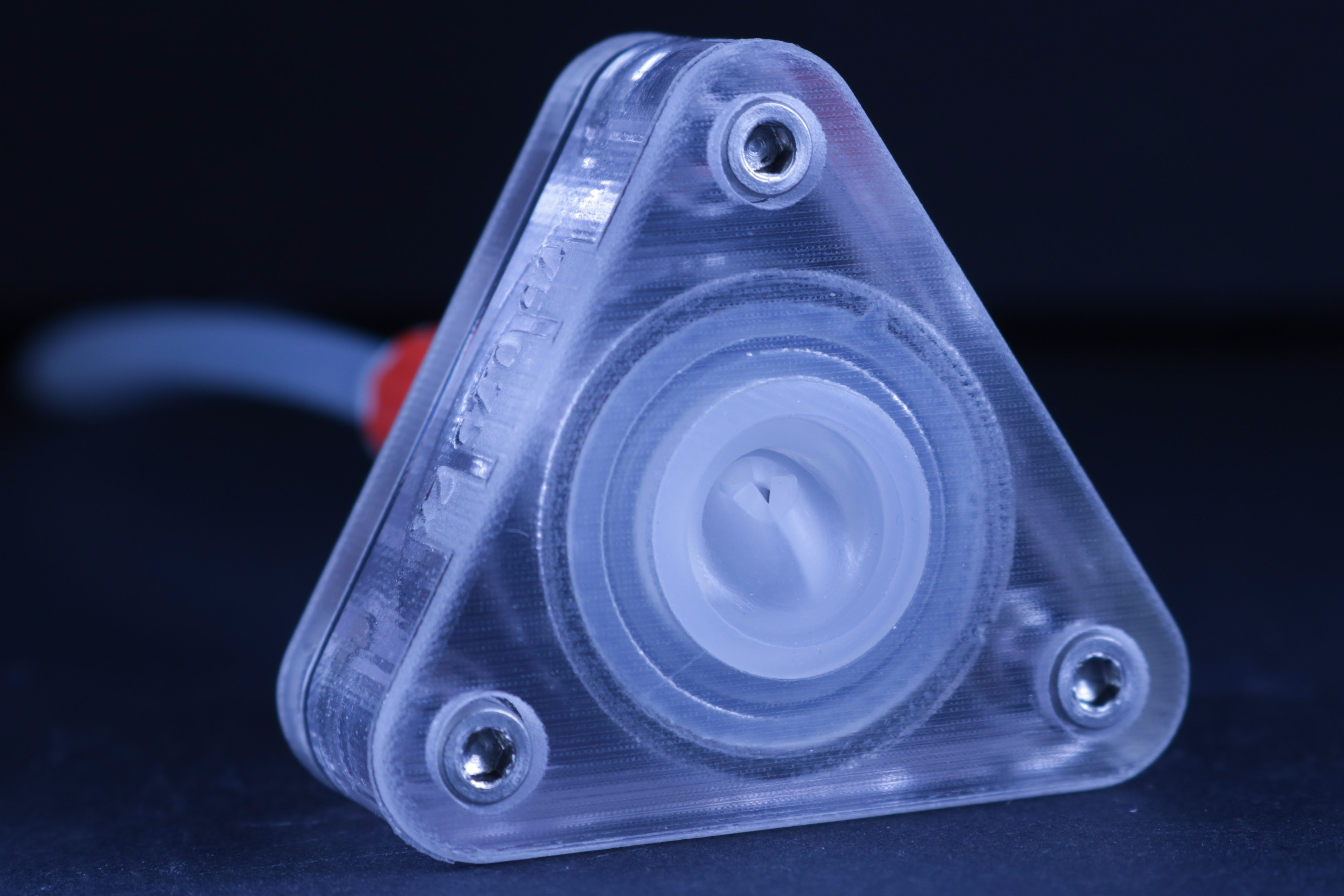
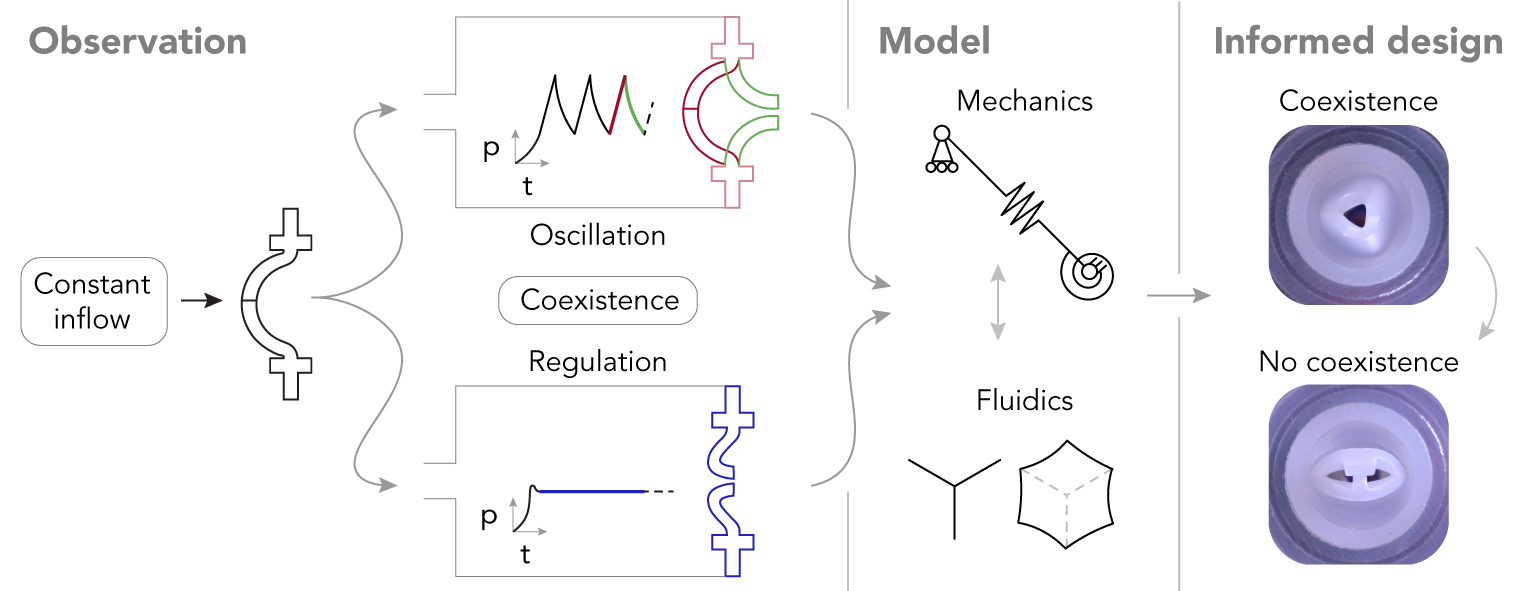
Self-oscillating limbs - soft tubes that move with air - synchronize when physically coupled together. Autonomous and fast locomotion gaits spontaneously emerge from the interactions with the environment alone, with no control signals. Seemingly simple devices, surprisingly complex behaviors.